
Python 三维姿态估计 Unity3d 实现 3D 虚拟现实交互游戏
时间:2021-11-12 13:51:58
手机看文章
扫描二维码
随时随地手机看文章
[导读]作者|李秋键出品| AI科技大本营(ID:rgznai100)引言随着人机交互技术飞速发展,人体姿态估计技术越来越受到重视。姿态估计作为人体行为识别的重要组成部分,近年来逐渐成为计算机视觉领域的一个重要的研究热点。由于人体结构和姿态的复杂性以及视觉理论的局限性,最初人体姿态估计算...
作者 | 李秋键出品 | AI科技大本营(ID:rgznai100)
 引言随着人机交互技术飞速发展,人体姿态估计技术越来越受到重视。姿态估计作为人体行为识别的重要组成部分,近年来逐渐成为计算机视觉领域的一个重要的研究热点。由于人体结构和姿态的复杂性以及视觉理论的局限性,最初人体姿态估计算法仅从图像或者视频当中预测人体二维骨架节点的坐标位置。2015年马普所提出了由姿态与体型参数驱动的蒙皮多人线性模型,由于该模型具有出色的建模效果与快速的计算效率,许多团队提出了利用该模型进行人体姿态估计的方法。目前基于人体形变模型的姿态估计方法可以根据两个标准进行分类:一类是基于优化的方法,另一类是基于回归的方法。而最终发展到现在三维人体姿态估计也随之发展越来越成熟。
引言随着人机交互技术飞速发展,人体姿态估计技术越来越受到重视。姿态估计作为人体行为识别的重要组成部分,近年来逐渐成为计算机视觉领域的一个重要的研究热点。由于人体结构和姿态的复杂性以及视觉理论的局限性,最初人体姿态估计算法仅从图像或者视频当中预测人体二维骨架节点的坐标位置。2015年马普所提出了由姿态与体型参数驱动的蒙皮多人线性模型,由于该模型具有出色的建模效果与快速的计算效率,许多团队提出了利用该模型进行人体姿态估计的方法。目前基于人体形变模型的姿态估计方法可以根据两个标准进行分类:一类是基于优化的方法,另一类是基于回归的方法。而最终发展到现在三维人体姿态估计也随之发展越来越成熟。
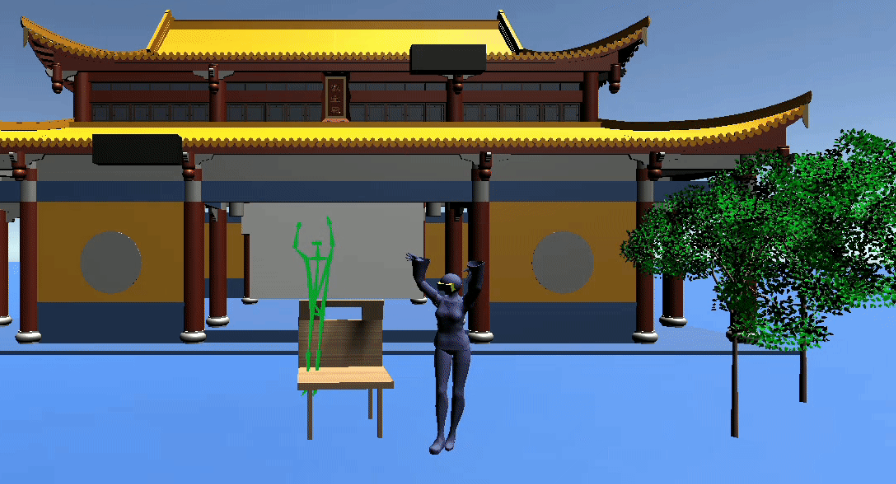
 三维姿态控制介绍在三维姿态估计的基础上,使用unity对实时获取的三维骨骼坐标和角色骨骼绑定,控制角色动画,达到交互的效果。
三维姿态控制介绍在三维姿态估计的基础上,使用unity对实时获取的三维骨骼坐标和角色骨骼绑定,控制角色动画,达到交互的效果。
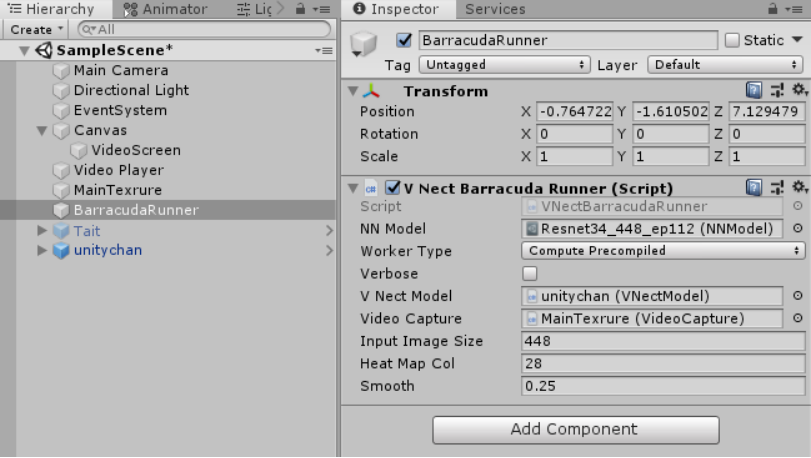
 程序设计这里三维姿态估计使用Resnet34_3inputs_448x448_20200609.onnx模型,unity3D是对onnx模型的调用,同时搭建三维场景和设计逻辑规则。
程序设计这里三维姿态估计使用Resnet34_3inputs_448x448_20200609.onnx模型,unity3D是对onnx模型的调用,同时搭建三维场景和设计逻辑规则。


引言随着人机交互技术飞速发展,人体姿态估计技术越来越受到重视。姿态估计作为人体行为识别的重要组成部分,近年来逐渐成为计算机视觉领域的一个重要的研究热点。由于人体结构和姿态的复杂性以及视觉理论的局限性,最初人体姿态估计算法仅从图像或者视频当中预测人体二维骨架节点的坐标位置。2015年马普所提出了由姿态与体型参数驱动的蒙皮多人线性模型,由于该模型具有出色的建模效果与快速的计算效率,许多团队提出了利用该模型进行人体姿态估计的方法。目前基于人体形变模型的姿态估计方法可以根据两个标准进行分类:一类是基于优化的方法,另一类是基于回归的方法。而最终发展到现在三维人体姿态估计也随之发展越来越成熟。
三维姿态控制介绍在三维姿态估计的基础上,使用unity对实时获取的三维骨骼坐标和角色骨骼绑定,控制角色动画,达到交互的效果。
程序设计这里三维姿态估计使用Resnet34_3inputs_448x448_20200609.onnx模型,unity3D是对onnx模型的调用,同时搭建三维场景和设计逻辑规则。
李秋键,CSDN博客专家,CSDN达人课作者。硕士在读于中国矿业大学,开发有taptap竞赛获奖等。





