-
平衡小车PID,就该这么调!!!
上一篇文章:看完这篇文章,还不会做平衡小车,你来打我。 描述了平衡小车的制作过程,也开源了一部分设计资料。 在上篇文章留言中,有朋友说: 安排,必须安排! 1、PID 关于PID的概念,网上相关的帖子太多,在此不再赘述。 之前也有过几篇关于PID的文章:
-
看完这篇文章,还不会做平衡小车,你来打我。
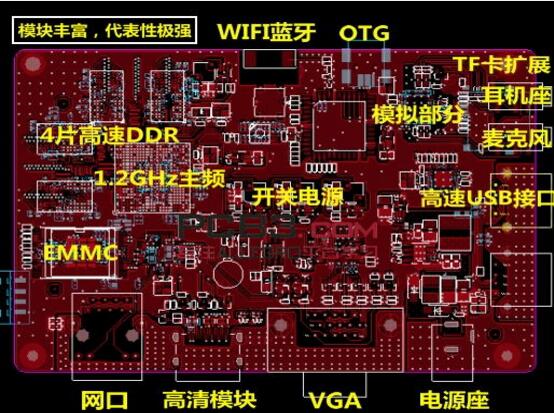
0、前 言 原谅我起这么猛的标题,但看完,你不会来打我的。 如果此项目有朋友已经做过,可以越过不看。 回归正题, 平衡小车 ,这个开源项目已经出来很多年了,虽然是一个比较基础的项目,但也牵扯到方方面面的知识,单片机程序开发、硬件电路设计、焊接手法
-
四轴、平衡小车等的互补滤波的应用
互补滤波加速度计对小车的加速度比较敏感,取瞬时值计算倾角误差比较大;而陀螺仪积分得到的角度不受小车加速度的影响,但是随着时间的增加积分漂移和温度漂移带来的误差比较大。所以这两个传感器正好可以弥补相互的
-
平衡小车卡尔曼滤波算法
这次的平衡车,使用到了卡尔曼滤波,下面谈谈使用心得我们是利用角速度传感器和加速度传感器测量得到角度和角速度,但是由于车子是运动的,我们利用加速度得到的角度并不完全正确,由于噪声干扰,我们对角速度传感器