(文章来源:天极网) 如果机器人要拿起一个物体并将其放进一个容器里。首先,机器人需要观察物体,在6D空间中决定抓取器的移动位置。需要注意的是,抓取成功与否还取决于物体和夹具的几何形状、物
巧克力娃娃
知识变现正当时,上传资料赢红包【辞旧迎新】
小 i linux驱动 学习秘籍
手把手教你学STM32-Cortex-M4(中级篇)
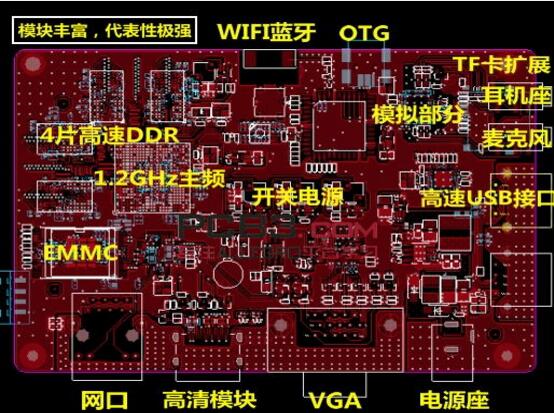
Allegro 高速PCB设计软件使用技巧
吴恩达coursera机器学习(中文字幕)
内容不相关 内容错误 其它