雷达系统的基本功能是可以探测目标并测量相关参数,包括目标的距离、速度和角度等。下图显示了雷达系统的基本处理过程,包括发射机、天线、接收机、显示器等部分。
雷达发射机产生信号,放大后通过天线以电磁波的形式辐射出去,遇到物体反射的回波被天线接收,雷达想要探测的物体称为“目标”,而将其他物体的回波称为“杂波”。
天线接收到的信号经过放大并进行信号处理,获得目标信息后由屏幕显示出目标的距离、速度和方向等多维度的信息。
由于电磁波的速度恒定为c=3*10^8m/s,那么若能测量出接收目标回波时刻相对于发射时刻的时间差t,那么就可以通过R=ct/2来计算目标距离。
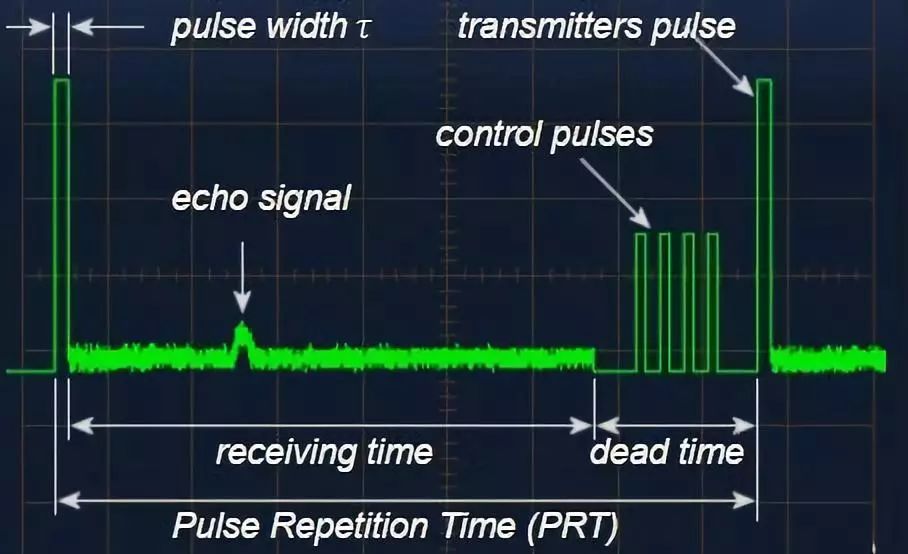
对于单站脉冲体制的雷达,由于在发射信号时并不接收目标回波,因此存在一定测距的盲区,也就是雷达有最小探测距离。
距离盲区与发射的脉冲宽度相关,对于脉冲宽度1us对应150m的距离盲区,对于稍大脉宽的信号将有太大的距离盲区,例如100us的脉宽就有15km距离盲区。当然,采用收发分置或者连续波雷达将会解决距离盲区的问题,但会带来例如隔离等其他问题。
脉冲重复频率(PRF)是脉冲重复间隔(PRT)的倒数,PRT=1/PRF。它将直接影响最大不模糊距离,也就是目标的回波在当前PRF即可返回。如果目标的雷达回波信号在下一个或下几个脉冲回波中才回来,那么就存在距离模糊。
我们可以通过参差PRF来解决,根据回波在不同PRF脉冲中位置的不稳定性来解模糊。点此查看:
解距离模糊的方法
当然,对于相控阵雷达,通过灵活的波束指向控制以不接收先前脉冲的回波也可以解决距离模糊的问题。
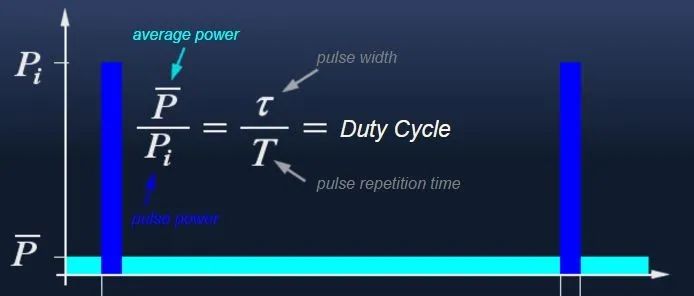
如上图,占空比是脉冲宽度与脉冲重复间隔(周期)的比值,等于脉冲发射的平均功率与脉冲峰值功率的比值。
从雷达方程可以看出雷达最大的探测距离是与发射机的输出功率直接相关的,最大发射功率通常是受限的,但是可以通过提高占空比来增加平均功率,从而增加探测距离。从上图中列出的关系,我们发现可以增加脉宽和减少脉冲重复间隔时间来提高占空比。
从上图可以看出脉冲串的脉宽和周期及其频谱特性的关系。
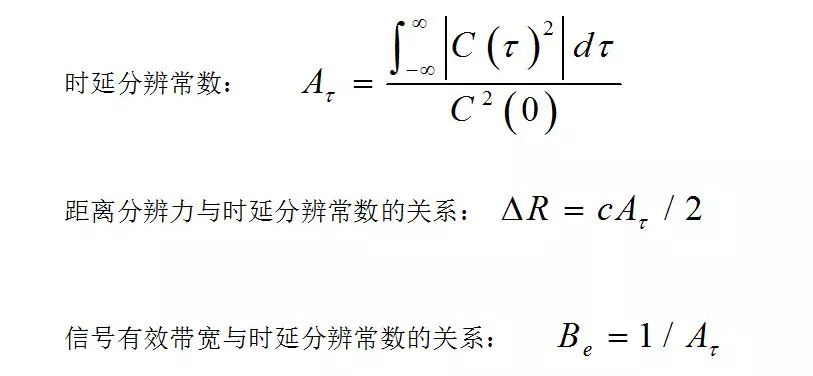
实际的距离分辨力很复杂,为了全面考虑距离自相关函数主峰、旁瓣对分辨能力的影响,Woodward定义了一个反映分辨特性的参数:时延分辨常数,它与信号的有效带宽成反比。
时延分辨常数是将相应主峰、旁瓣或类似噪声基地的全部能量计算在一起,除以主峰最高点功率所得的时间宽度。时延分辨常数越小,距离自相关函数的主峰窄、旁瓣或基底小,对分辨目标是有利的。
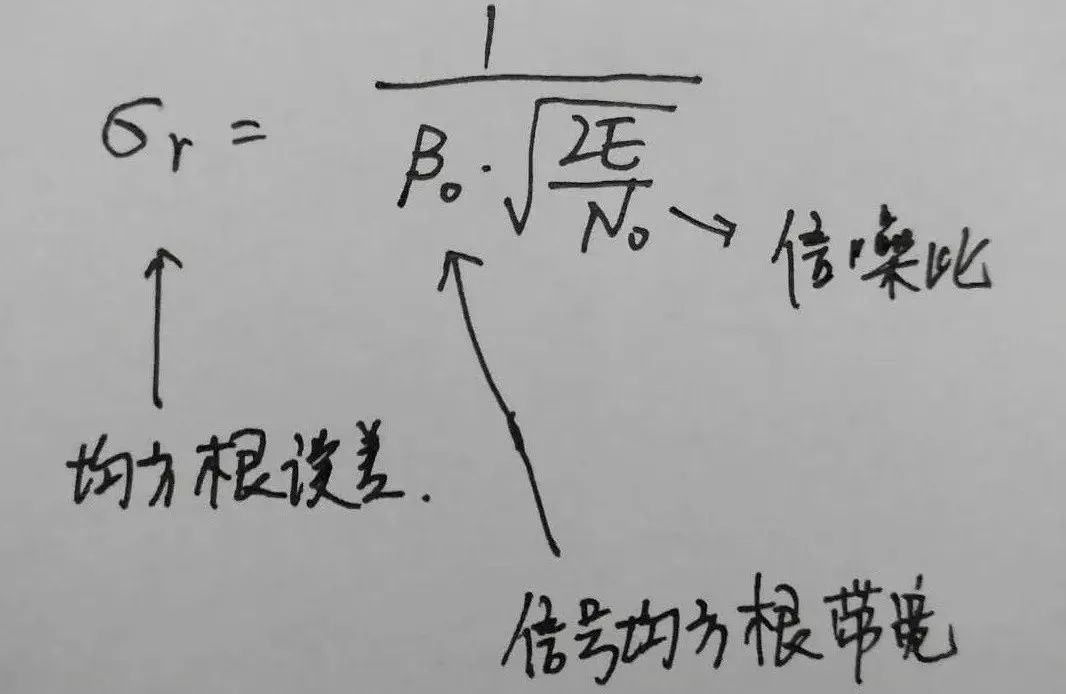
首先要知道测距精度和距离分辨力是不同的概念。我们知道通过测量雷达回波的时延来测量目标的距离,但是系统对于时延的测量会有误差,这个误差的大小就是精度问题。
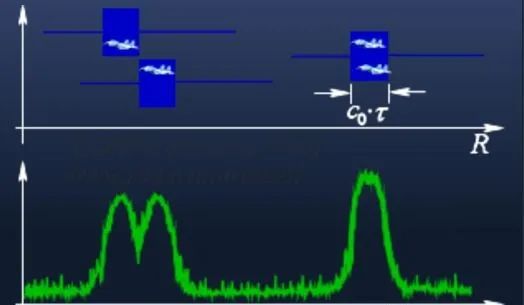
距离分辨率是雷达能区分二个目标的最小距离,二个目标相距小于它,雷达就认为是一个目标了。而测距精度则表示对某一个目标距离测量的精确性问题,它与信噪比和信号均方根带宽有关。
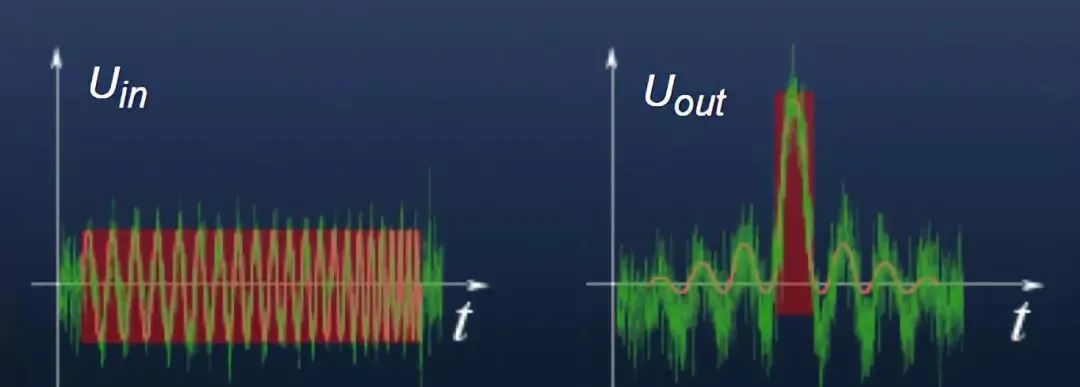
脉冲压缩技术是匹配滤波理论和相关接收理论的一个很好的实际应用。它的提出很好的解决了这样的一个问题:
在发射端发射大时宽、带宽信号,以提高信号的速度测量精度和速度分辨力;而在接收端,将宽脉冲信号压缩为窄脉冲,以提高雷达对目标的距离分辨精度和距离分辨力;
脉冲压缩雷达发射宽脉冲信号,接收和处理回波后输出窄脉冲的雷达,优点是能获得大的作用距离和很高的距离分辨力。