-
基于51单片机的模拟串口设计
收端是不会判断所谓某个字节的起始位的,接收机如果是在接收的状态,那么只要它的接收引脚检测到有低电平(这个低电平不是检测一次,而是检测3次,判断有2次均是低电平则最终判断为低电平,即起始位),那么接收端就开始以设定的波特率接收数据,判断数据时也是判断3次2次有效,也就是说,只要检测到低电平它就接收。
-
浅谈套接口的类型和虚电路分类
什么意思?有两种 Internet 套接口?是的。不,我在撒谎。其实还有很多,但是我可不想 吓着你。我们这里只讲两种。 Except for this sentence, where I‘m going to tell you that “Raw Sockets” are also very powerful and you should look them up. 好了,好了。那两种类型是什么呢?一种是 “Stream Sockets”,另外一种是 “Datagram Sockets”。我们以后谈
-
飞线是什么意思_飞线有哪些技巧
飞线是指排线由于经常受到按压,导致折叠部位断裂而接触不良,在断裂的两端用细的漆包线用烙铁焊接。
-
CAN总线概述及应用_CAN总线的应用案例(汽车CAN总线应用)
CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。CAN 总线的数据通信具有突出的可靠性、实时性和灵活性。由于其良好的性能及独特的设计,CAN总线越来越受到人们的重视,它在汽车领域上的应用是最广泛的。接下来及跟随小编一起来了解一下CAN总线的工作原理、特点及优缺点、应用领域及应用案例吧。
-
IIC和SPI总线协议的区别
现今,在低端数字通信应用领域,我们随处可见IIC (Inter-Integrated Circuit) 和 SPI (Serial Peripheral Interface)的身影。原因是这两种通信协议非常适合近距离低速芯片间通信。Philips(for IIC)和Motorola(for SPI) 出于不同背景和市场需求制定了这两种标准通信协议。
-
部分可重配置设计流程——配置分析报告
部分可重配置(PR)设计流程一个独特的方面是有多个设计版本必须通过布局布线来实现,这些不同的“配置”具有相同的静态设计结果,但是在每个可重配置区(PR)有不同的模块,设计者必须设置时序约束和平面布局图并且考虑需要交换的不同模块,这是具有一定挑战性的。
-
一文读懂can总线的特点和优缺点
CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO11898),是国际上应用最广泛的现场总线之一。在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
-
can总线仲裁机制详解
CAN总线是一种基于优先级的串行通信网络,采用载波监听多路转换冲突避免协议,CAN总线中传输的数据帧的起始部分为数据的标识符,标识符可以区分消息又可以表示消息的优先级(0 的优先级最高)。
-
总线型拓扑结构优缺点是什么
计算机网络拓扑结构是指网络中各个站点相互连接的形式,在局域网中明确一点讲就是文件服务器、工作站和电缆等的连接形式。现在最主要的拓扑结构有总线型拓扑、星形拓扑、环形拓扑、树形拓扑(由总线型演变而来)以及它们的混合型。顾名思义,总线型其实就是将文件服务器和工作站都连在称为总线的一条公共电缆上,且总线两端必须有终结器;星形拓扑则是以一台设备作为中央连接点,各工作站都与它直接相连形成星型;而环形拓扑就是将所有站点彼此串行连接,像链子一样构成一个环形回路;把这三种最基本的拓扑结构混合起来运用自然就是混合型了!
-
STM32F4 C++ 封装库 之 EXTI
这几天看了下 mbed 的源码,给上层应用调用的接口封装的还是不错的。代码质量比较高,注释也很详细,文档和例程比较全。但是驱动层的程序全是 C 语言编写的,代码质量就没有那么高了,注释比较少而且不规范,比较怀疑 mbed 的稳定性。mbed 的实时内核是用的 RTX5 ,文件系统用的 FatFs ,还有一些开源的协议栈,整套系统比较繁杂。mbed 框架是为物联网设备开发的,工业控制级别的产品可以考虑用 RTE 框架。RTE 框架目前驱动层程序还不太完善,有好多需要自己去实现,可能在过一段时间会好一些吧。总
-
如何设计基于CAN总线的智能照明控制系统?
随着经济建设的日益发展和社会物质文化水平的不断提高,人们开始追求灯光艺术带来的美的享受,注重照明和其他相关设备、系统的整体控制效果,照明控制系统的安装捷性、可靠
-
如何研究基于CAN现场总线的时间信息共享技术?
引言电子时间引信系统从火控计算单元提取的射弹飞行时间数据需要实时可靠地传送给编程装置,为保证时间信息传送的准确、及时,我们采用了CAN总线进行时间信息的传输。CAN总
-
详解CAN总线位定时和同步机制
CAN总线位定时和同步机制的分析The Analysis of Bit Timing and Synchronization Mechanism of CAN Bus天津大学自动化学院 李芳,刘鲁源,吕伟杰摘要:CAN总线位定时参数可
-
嵌入式192x64串口点阵中文液晶屏应用
FV19264SA嵌入式串口中文液晶控制模块 数据传输协议定义
-
详解如何设计XY·CN总线通信系统的电源系统?
XY·CN总线是一种低成本的、一点对多点的现场总线通信系统,该系统的优势之一是其无与伦比的节电优势,要发挥该优势,就要注意各部分的电源设计方法。总线电压在12~
-
最新专用USB-C控制器芯片:简化设计的高集成度、降低BoM成本
USB开发者联盟(UBS-IF)推出的USB供电(USB PD)标准最新3.0版本将引发电源适配器、移动电源和充电器制造商为笔记本电脑、平板电脑和手机等新消费类设备开发新产品的浪潮。通过USB Type-C连接器实现的USB PD 3.0可使用最大20伏 / 5安电源,将USB接口的额定功率从7.5瓦提高到最高100瓦。通过引入USB PD 3.0,使通过USB Type-C的电池可快充和为一体式PC的供电系统成为可能。
-
带您认识ISO11898-4:时间触发通讯
LinkedInCAN总线通讯发展的过程中,为了兼容实时操作系统,是否也有与之对应的实时通讯网络协议呢? ISO11898之前3个部分的解读提高了对传统CAN网络的理解,无论是高速CAN还是低速CAN,亦或者是最基础的物理层定义都进行了详细的阐述。传统的CAN网络总线通讯基本都是事件触发的,当同时有许多信息需要传输时可能会造成总线过载,为了避免这种现象,传统CAN网络采用仲裁机制按信息优先级进行传输。
-
使用IP集成器调试AXI接口
用户可以使用IP集成器连接IP 模块创建复杂的系统设计。通过接口构建基于模块的设计,一般情况下接口包含多个总线和大量的信号线。因此,为了方便在硬件上调试那些包含大量接口的设计,就需要验证设计的接口连接。
-
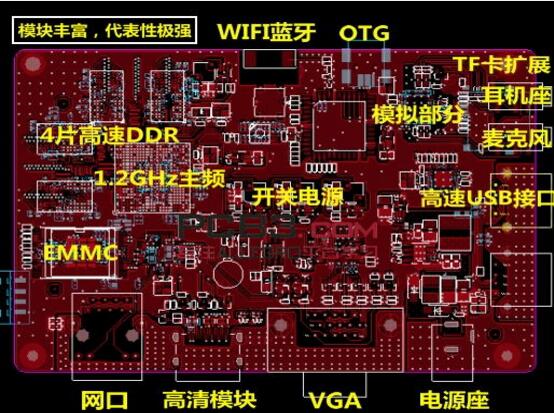
嵌入式DDR总线结构介绍及硬件信号布线分析
嵌入式DDR(Double Data Rate,双数据速率)设计是含DDR的嵌入式硬件设计中最重要和最核心的部分。随着嵌入式系统的处理能力越来越强大,实现的功能越来越多,系统的工作频率越来越高,DDR的工作频率也逐渐从最低的133 MHz提高到200 MHz,从而实现了更大的系统带宽和更好的性能。然而,更高的工作频率同时也对系统的稳定性提出了更高的要求,这需要硬件设计者对电路的布局走线有更多的约束和考虑。而影响整个系统能否工作正常且稳定的最重要的部分就是DDR部分的电路设计。嵌入式系统使用DDR内存,可以
-
浅谈I2C总线,有时候它也叫 IIC
I2C(Inter Integrated Circuit,内部集成电路)总线是价格低廉却很有效的用以互连小规模嵌入式系统内的外设的网络。I2C 总线有时候也叫作 IIC,它已有20多年的历史了。I2C 接口和 SPI 接口的作用相同,但二者的使用方法有些不同。